Análisis y caracterización de sistemas LTI mediante la transformada Z¶
Propiedades de los sistemas LTI¶
Aplicando la propiedad de convolución, en un sistema LTI discreto podemos escribir:
donde es la transformada Z de la respuesta al impulso, conocida como la función de transferencia del sistema. Esta función proporciona mucha información acerca del sistema LTI, incluyendo el estudio directo de la causalidad y estabilidad del sistema.
Causalidad¶
Recordamos que, respecto a la causalidad, definimos tres situaciones posibles para un sistema: causal, anticausal y no causal.
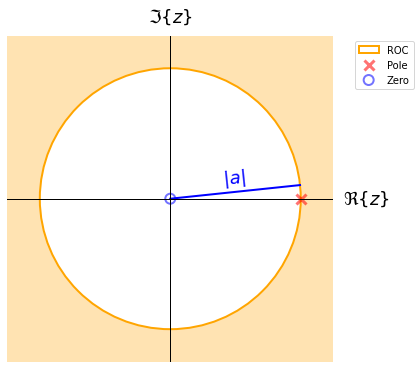
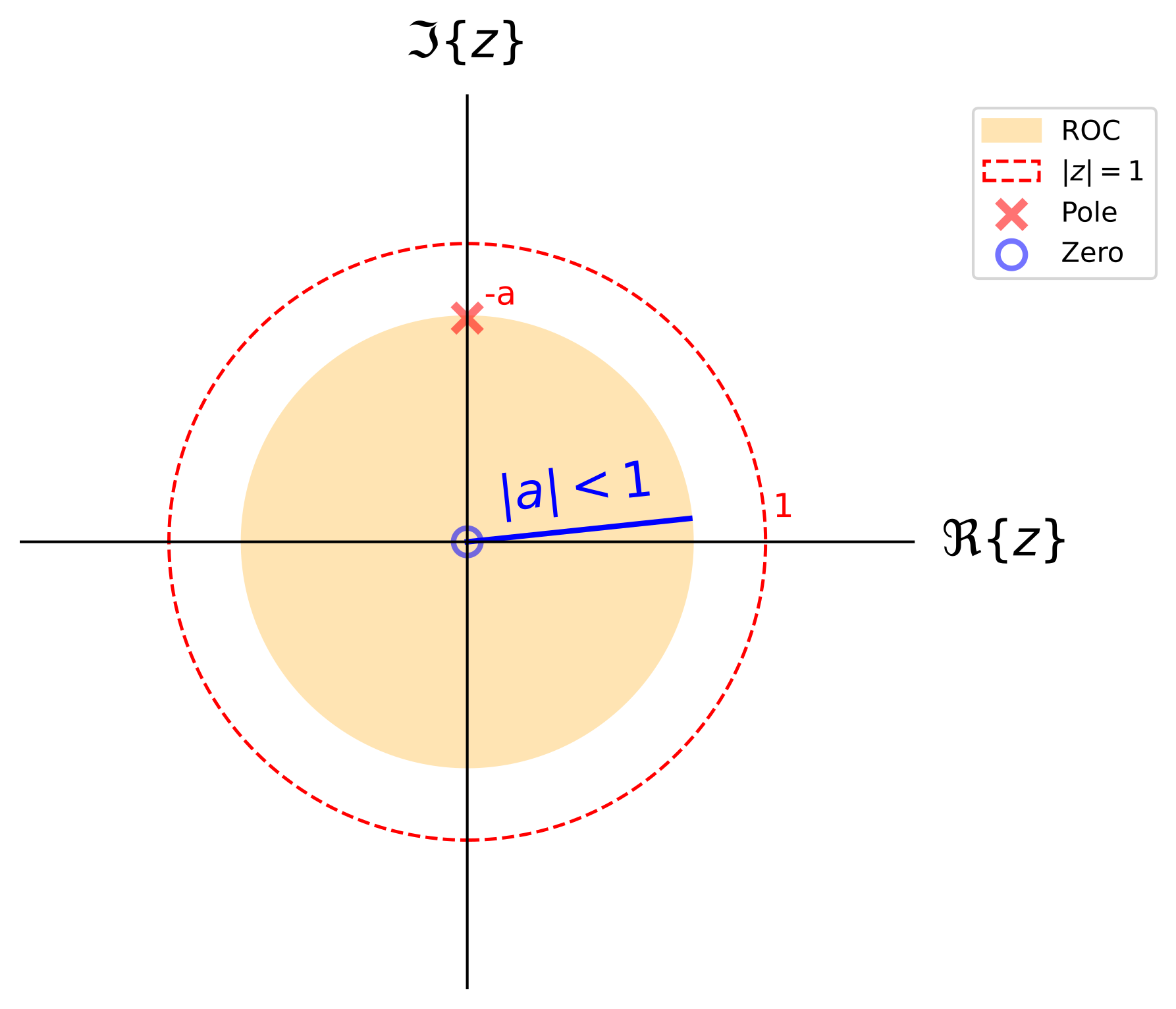
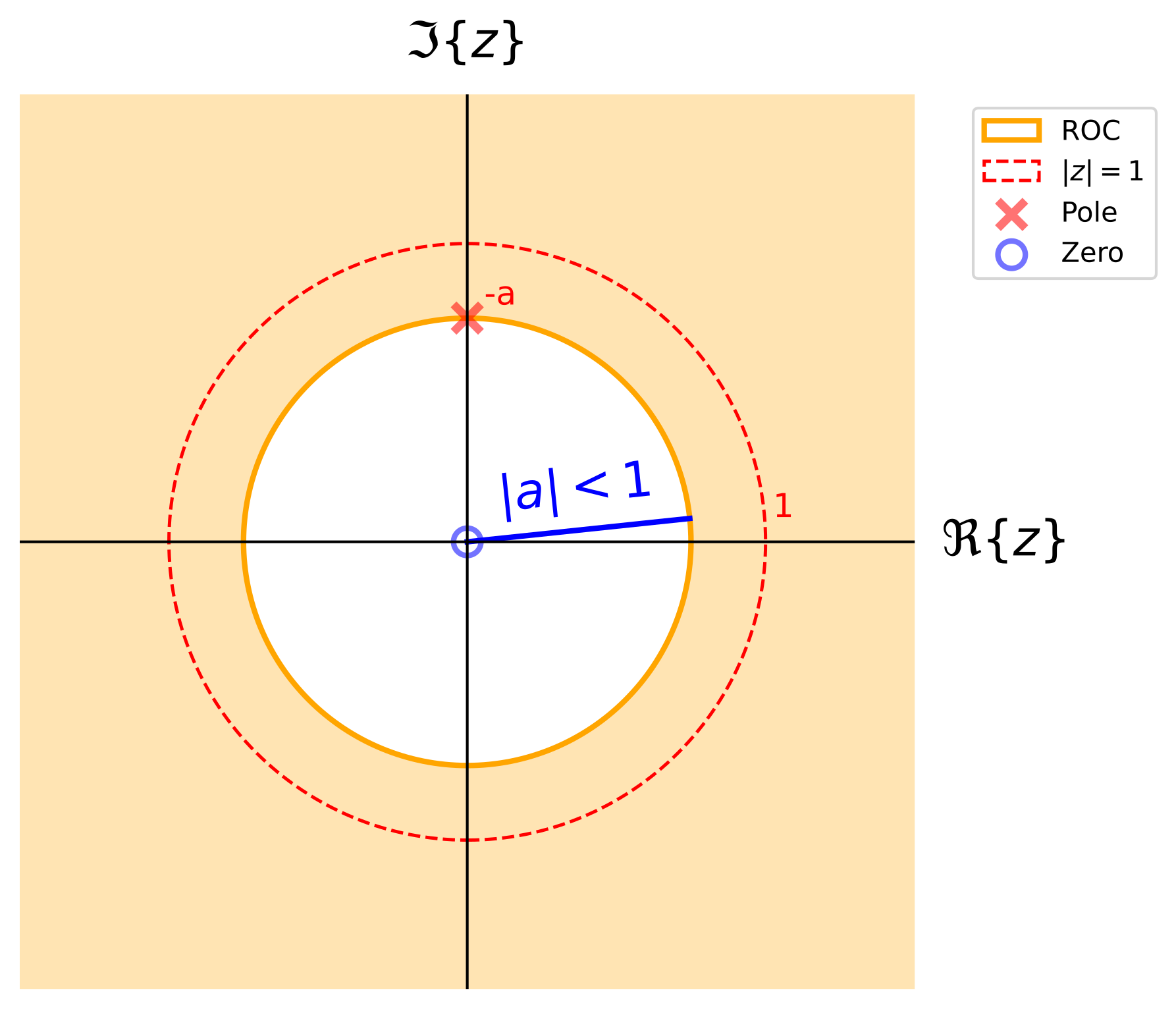
Un sistema es causal si . Esto implica que la respuesta al impulso es una secuencia derecha cuya transformada Z converge hacia el exterior de un círculo. Por lo tanto, un sistema es causal si la ROC de es de la forma y no hay polos en . Ilustramos esta situación con el ejemplo 1 (Exercise 1) utilizado para analizar la convergencia de la transformada Z , asumiendo como valor real positivo:
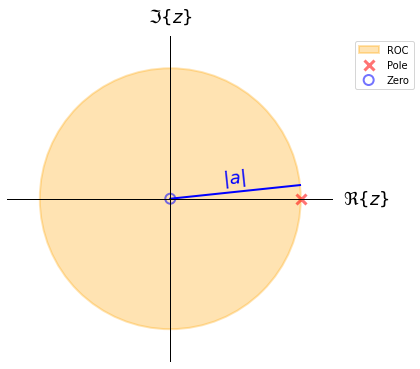
Un sistema es anticausal si . Esto implica que la respuesta al impulso es una secuencia izquierda cuya transformada Z converge hacia el interior de un círculo. Por lo tanto, un sistema es anticausal si la ROC de es de la forma y tiene un cero en el origen. Ilustramos esta situación con el ejemplo 2 (Exercise 2) utilizado para analizar la convergencia de la transformada Z , asumiendo como valor real positivo:
Un sistema es no causal en cualquier otro caso. Se incluyen tanto el caso definido para los sistemas causales pero con polo en , como el de los sistemas anticausales sin cero en el origen.
Estabilidad¶
Recordamos que un sistema LTI discreto es estable si:
Si se cumple esta condición, existe la transformada de Fourier de , es decir, . Ya vimos al estudiar la convergencia de la transformada Z que la transformada de Fourier converge (sin deltas) si la circunferencia unidad se encuentra dentro de la ROC.
Por lo tanto, un sistema es estable si la ROC de la función de transferencia contiene la circunferencia unidad ().
A continuación, se ilustran algunos ejemplos:
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
# read images
img_1 = mpimg.imread('figures/T7/stable_causal.png')
img_2 = mpimg.imread('figures/T7/nonstable_anticausal.png')
img_3 = mpimg.imread('figures/T7/stable_ring.png')
# create subplot axis
fig, axs = plt.subplots(1,3,figsize=(15,11))
# plot the images
axs[0].imshow(img_1)
axs[1].imshow(img_2)
axs[2].imshow(img_3)
# turn off the axis
axs[0].axis('off')
_ = axs[1].axis('off')
_ = axs[2].axis('off')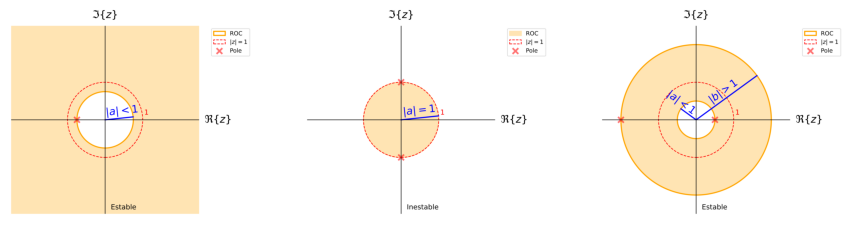
Invertibilidad¶
Dos sistemas LTI discretos son invertibles entre sí, si para sus respuestas al impulso se cumple (aplicando la propiedad de convolución):
siendo la función de transferencia de un sistema LTI, y la función de transferencia de su correspondiente sistema inverso.
Los polos y ceros de pasan a ser ceros y polos, respectivamente, de .
Un sistema LTI puede tener varios sistemas inversos (o ninguno) con distintas propiedades de causalidad y estabilidad de acuerdo con su ROC. Ilustramos este hecho con un ejemplo:
El sistema del ejemplo propuesto tiene un polo en y un cero en , mientras que cualquier sistema inverso tiene un cero en y un polo en . De acuerdo con la ROC, hay dos posibles sistemas inversos con distinta respuesta al impulso, pero igual función de transferencia:
ROC: . Sistema anticausal e inestable. .
ROC: . Sistema causal y estable. .
Sistemas LTI descritos mediante ecuaciones en diferencias¶
De manera análoga a lo realizado en el dominio de Fourier, la transformada Z se puede usar para obtener la respuesta al impulso de un sistema LTI en tiempo discreto a partir de una ecuación en diferencias con coeficientes constantes. Aplicando la propiedad de desplazamiento temporal:
Aplicando la propiedad de convolución:
A diferencia de lo que ocurre en el dominio de Fourier, con la transformada Z se pueden analizar ecuaciones en diferencias que caractericen sistemas no estables y con distintas situaciones de causalidad, esto es, diversas ROCs para la función de transferencia .
tiene polos (diferencia de mayor orden de la salida) y hasta ROCs (sistemas distintos). Ilustramos este suceso con un ejemplo:
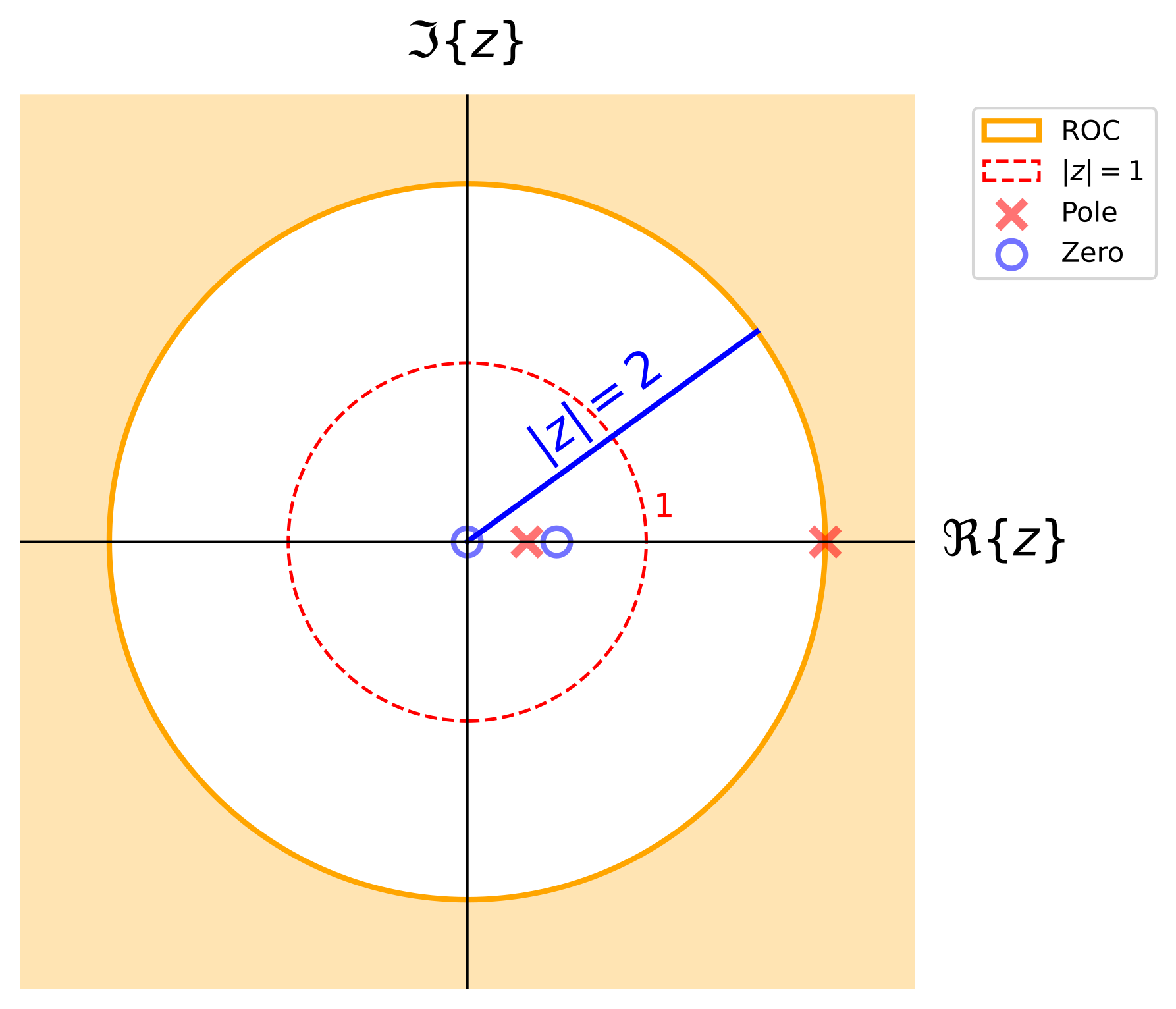
De la función de transferencia se pueden extraer los ceros y los polos. Concretamente, hay dos ceros en y en , y dos polos en y , coincidiendo el número de polos con la diferencia de mayor orden de la salida (). De acuerdo con las posibles ROCs de la función de transferencia, tenemos tres sistemas () distintos. Ponemos el resultado de la descomposición en fracciones simples y estudiamos los tres sistemas:
Sistema 1: causal e inestable. ROC: . Causal al no haber polos en .
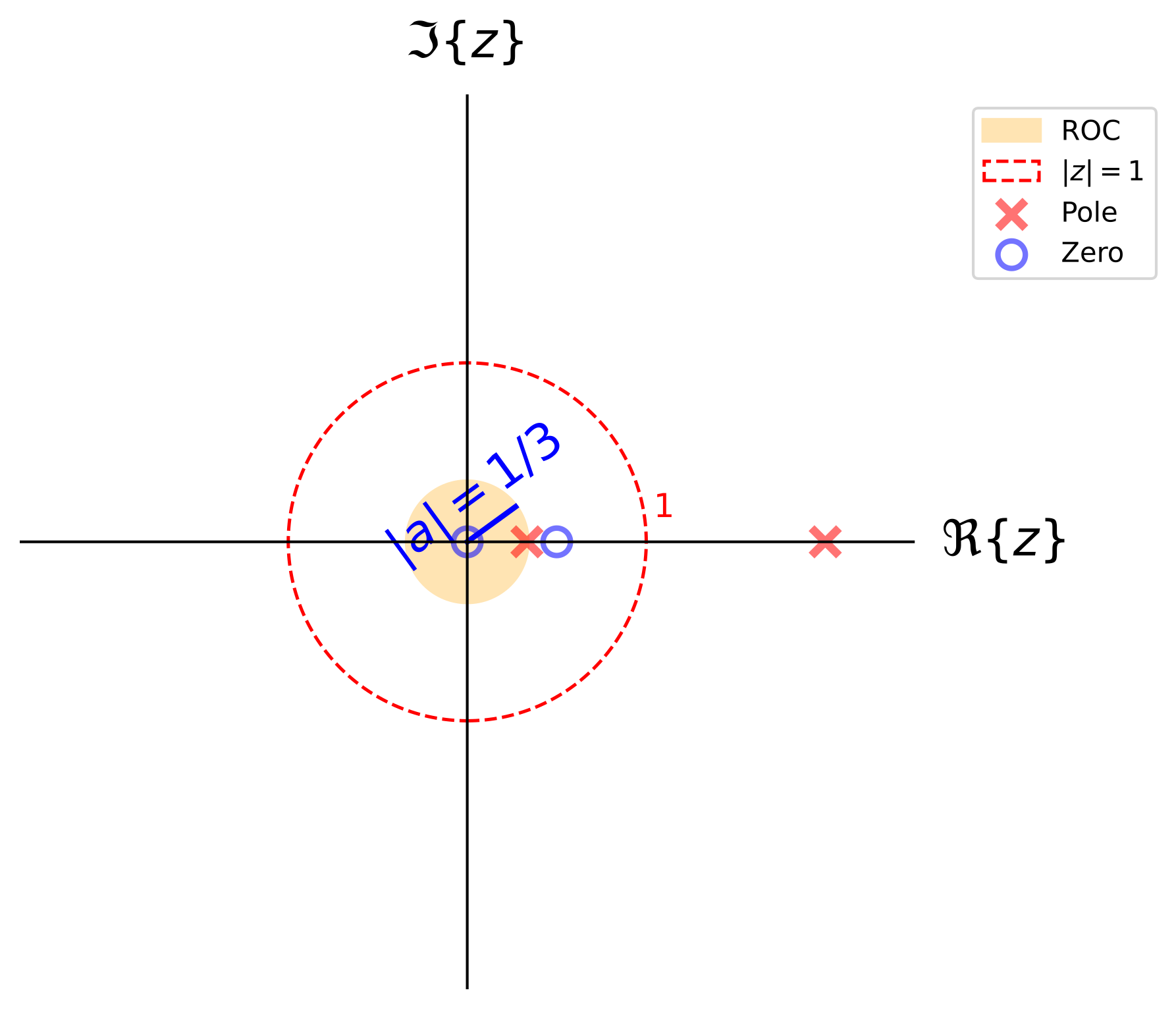
Sistema 2: anticausal e inestable. ROC: . Anticausal al haber un cero en el origen.
Sistema 3: no causal y estable. ROC: .
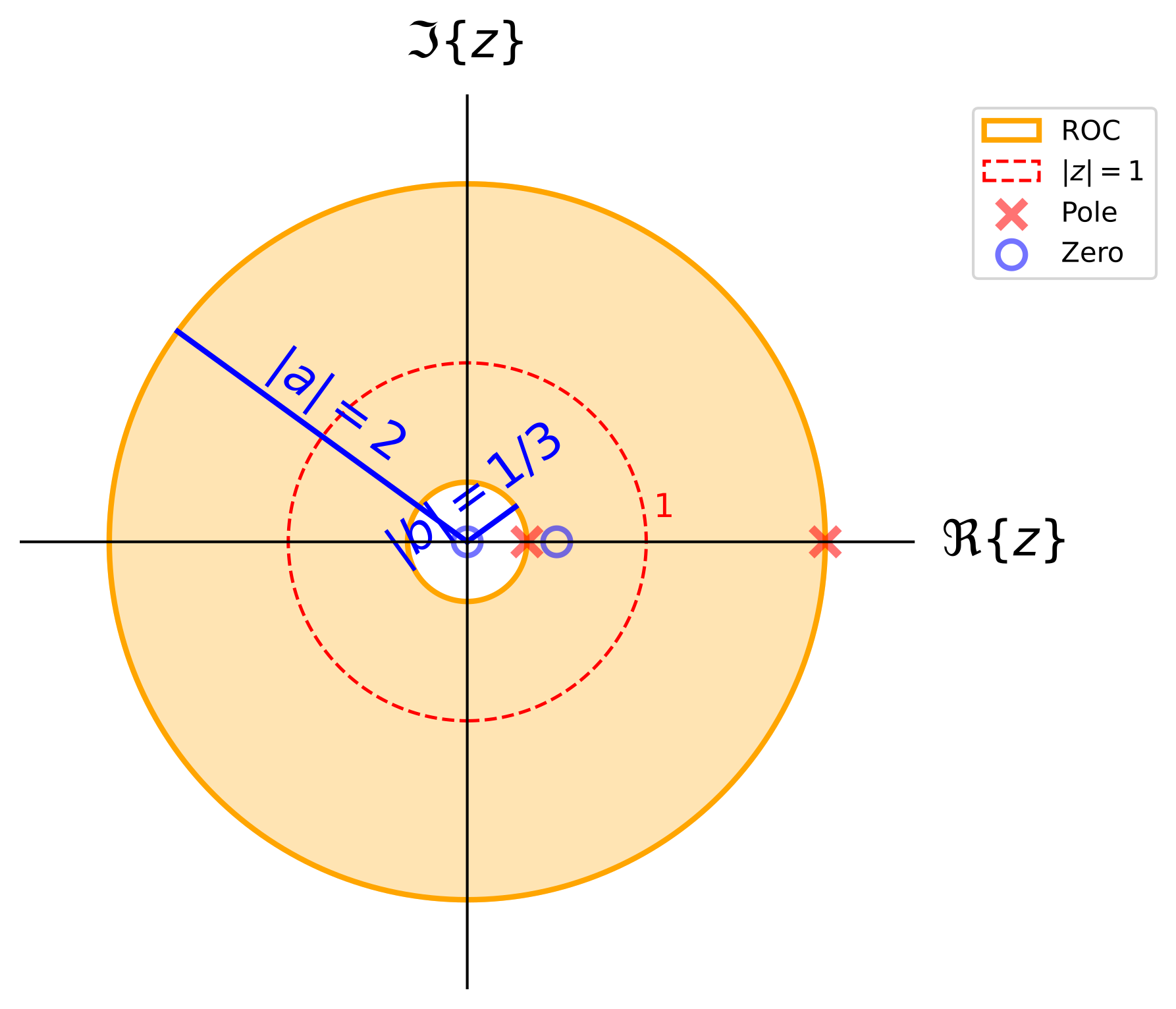
Cabe fijarse en que con la ROC el resultado es el conjunto vacío, esto es, que no existe la transformada Z.