Convergencia de la transformada Z¶
En el tema 4, vimos que la transformada de Fourier converge o no converge. En cambio, con la transformada Z, la convergencia se da por regiones al ser un número complejo con módulo y fase. Estas regiones se representan en el plano complejo Z y para cada caso la denominamos región de convergencia (ROC por sus siglas en inglés).
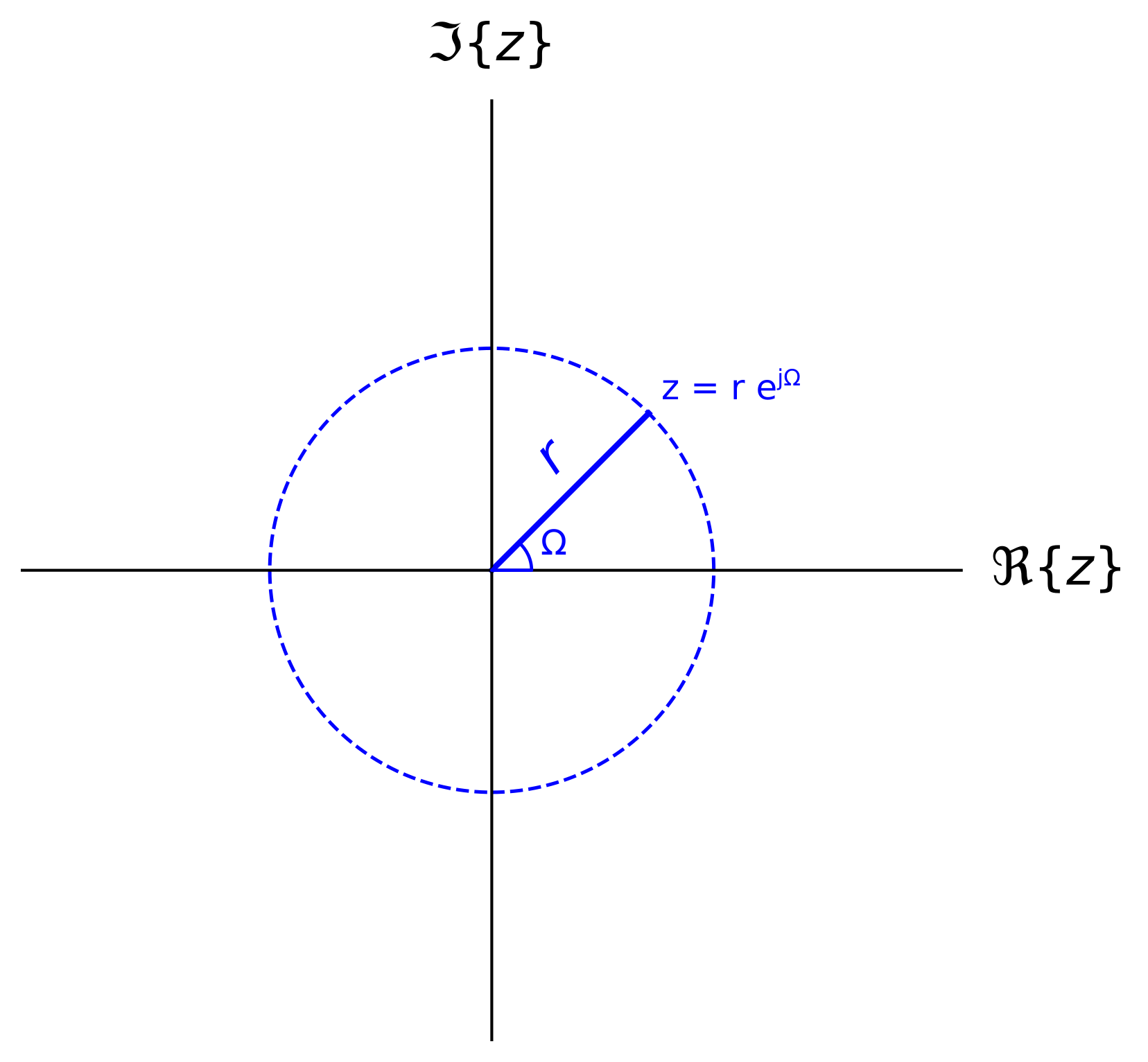
Idea: importar toolbox de migmar para dibujar el circulo y que el alumno pueda seleccionar los valores de radio y ángulo para hacer el dibujo
Teniendo en cuenta que en el plano complejo Z se representan todos los posibles valores de , con módulo generalmente con valor distinto a 1, la convergencia de la transformada Z se da por regiones que se representan en el plano Z, a diferencia de la transformada de Fourier.
A continuación, se muestran varios ejemplos de transformada Z para ilustrar dos situaciones y comprender la extracción de las regiones de convergencia a partir de la ecuación de análisis:
Representación de la región de convergencia a partir del módulo de .
Diferenciación de señales distintas pero con igual transformada Z, diferenciadas por la región de convergencia.
Para que este sumatorio (suma infinita de una serie geométrica) converja, la razón debe tener módulo inferior a 1:
Siendo la región de convergencia de la transformada Z de la señal . Entonces, si hay convergencia, la transformada Z de la señal se obtiene resolviendo la serie geométrica:
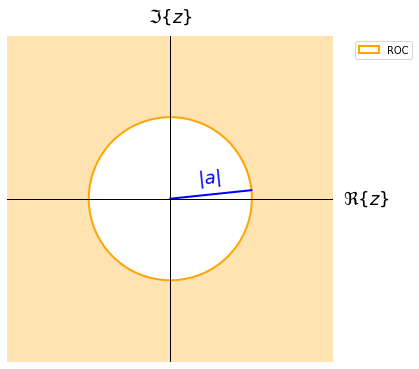
siendo esta expresión final la que se puede hallar en los pares de transformadas Z de la tabla, donde para cada señal en tiempo discreto mostrada se definen tanto su transformada Z como su región de convergencia. Ilustramos la región de convergencia en el plano Z:
Resolvemos este sumatorio con un cambio de variable, siendo , por lo que el sumatorio pasará a estar definido entre 1 e infinito, y se invierte la razón para mantener el exponente positivo:
Conviene fijarse en que, al igual que en el ejemplo anterior, para que el sumatorio converja, la razón debe tener módulo inferior a 1. Sin embargo, ahora tenemos la expresión inversa, por lo que:
Siendo la región de convergencia de la transformada Z de la señal en este ejemplo. Entonces, si hay convergencia, la transformada Z de la señal se obtiene resolviendo la serie:
siendo esta expresión final la que se puede hallar en los pares de transformadas Z de la tabla. Ilustramos la región de convergencia en el plano Z:
Respecto al resultado de los dos ejemplos, es importante fijarse en que, aunque las señales sean distintas, tienen la misma transformada Z, que se diferencia por la región de convergencia. Por lo tanto, para caracterizar una señal, es necesario tanto la expresión de su transformada como de la región de convergencia. Resumimos los resultados obtenidos en estos dos ejemplos:
Además, es importante describir el caso de , que se corresponde con la circunferencia unidad. Si la circunferencia unidad se encuentra dentro de la ROC, la transformada de Fourier converge (convergencia sin deltas).
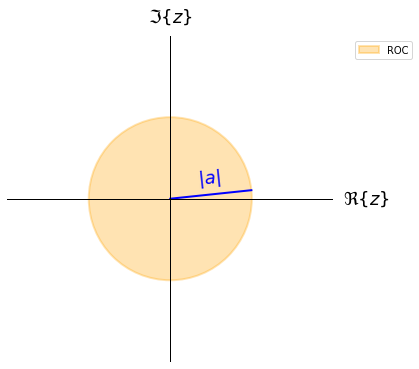
Partiendo de los dos ejemplos anteriores, asumiendo que , en la señal definida para tiempos negativos (ejemplo 2, izquierda en la figura de abajo), la transformada de Fourier converge, mientras que en la señal definida para tiempos 0 y positivos (ejemplo 1, derecha en la figura de abajo), la transformada de Fourier no converge, como se ilustra a continuación:
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
# read images
img_1 = mpimg.imread('figures/T7/example2_ROC_r1.png')
img_2 = mpimg.imread('figures/T7/example1_ROC_r1.png')
# create subplot axis
fig, (ax1, ax2) = plt.subplots(1,2,figsize=(11,8))
# plot the images
ax1.imshow(img_1)
ax2.imshow(img_2)
# turn off the axis
ax1.axis('off')
_ = ax2.axis('off')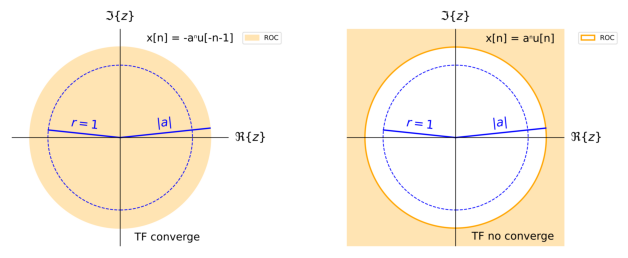
Propuesta: Adaptar el código de arriba con el toolbox de Miguel para que, para un valor concreto de (permitiendo solamente valores reales positivos) para cada uno de los dos casos, se indique si la TF converge o no a partir de un mensaje por pantalla que se encuentre junto con las figuras (o debajo) representadas arriba.
Propiedades de la región de convergencia¶
A continuación, se definen diversas propiedades de interés de la transformada Z:
La ROC no contiene ningún polo por definición. Recordando la definición de polo:
En este caso, no está incluida en la ROC.
La ROC de son anillos en el plano Z centrados en el origen de coordenadas. Ejemplo gráfico:
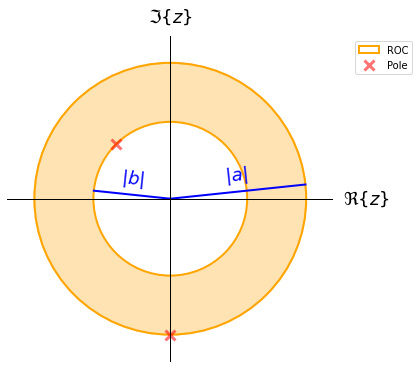
En este caso, cabe remarcar que tanto como no están dentro de la ROC debido a que hay polos para ambos valores (primera propiedad). Expresando la transformada Z como la transformada de Fourier de la señal , hay convergencia si:
lo que implica que la convergencia depende del valor de y no del valor de , dando lugar a regiones de convergencia circulares centradas en el origen.
Si la ROC contiene a la circunferencia unidad, , la transformada de Fourier converge (convergencia sin deltas de Dirac en la transformada de Fourier), como se mostró anteriormente.
Si la señal es de duración finita, la ROC será todo el plano Z, con posibles excepciones en el origen y el infinito.
: .
Ejemplo: .
.: .
Ejemplo: .: .
Ejemplo: .: .
(todo el plano).
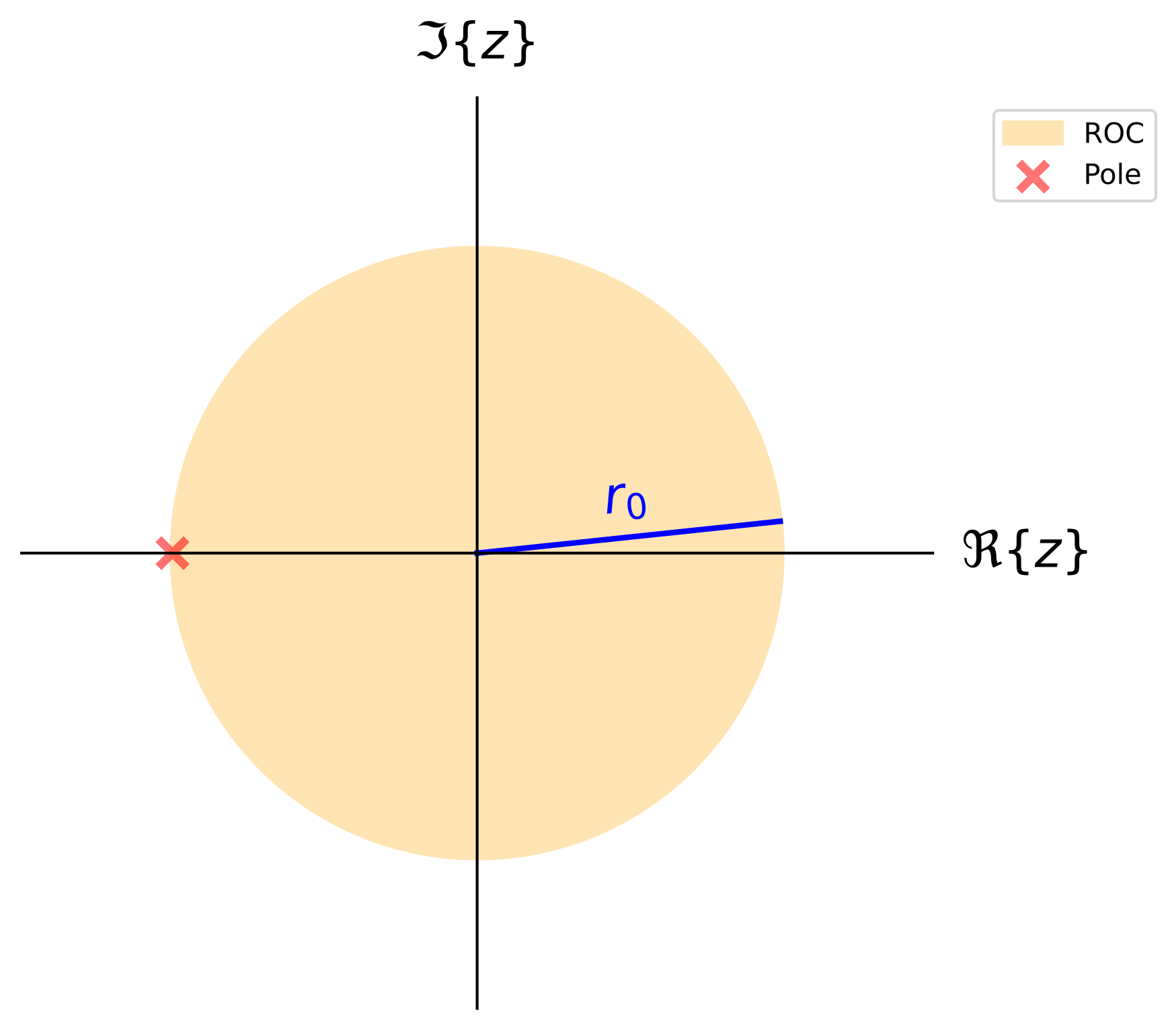
Si la señal es una secuencia derecha (), y la ROC contiene , la ROC contiene todos los valores finitos de tales que . La convergencia se da desde el polo de mayor módulo hacia el exterior.
Demostramos matemáticamente la convergencia:
la convergencia se da si , esto es, . Lo mostramos gráficamente:
Hay que tener cuidado con lo que ocurre en infinito:
Si : .
Si : .
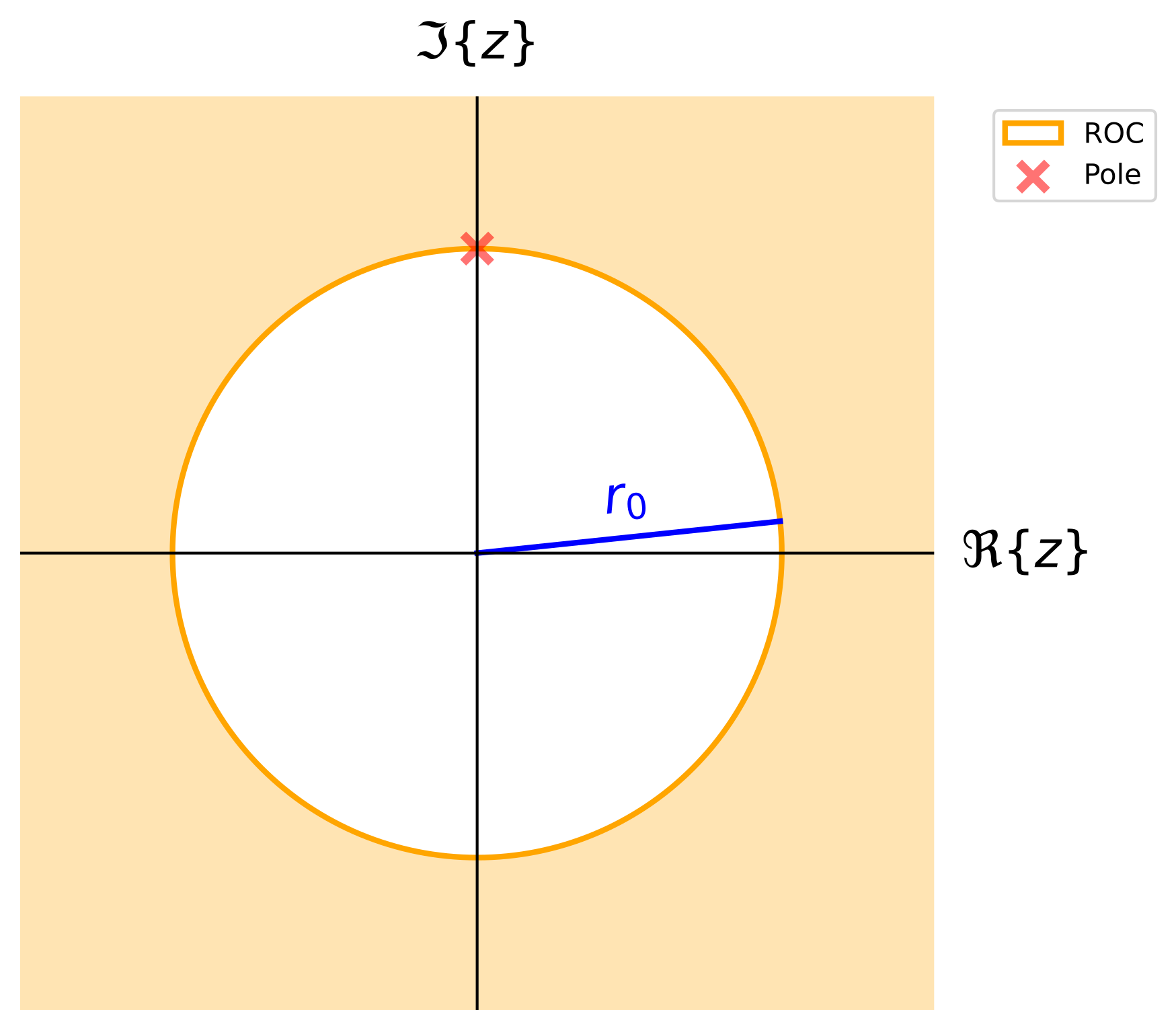
Si la señal es una secuencia izquierda (), y la ROC contiene , la ROC contiene todos los valores finitos de tales que . La convergencia se da desde el polo de menor módulo hacia el interior.
Demostramos matemáticamente la convergencia:
la convergencia se da si , esto es, . Lo mostramos gráficamente:
Hay que tener cuidado con lo que ocurre en el origen:
Si : .
Si : .
Si la señal es una secuencia bilateral, esto es, la suma de una secuencia derecha con otra izquierda (), y la circunferencia está en la ROC, la ROC será un anillo que contenga .
La transformada Z será:
La ROC, en caso de existir, será (por lo menos) la intersección de las ROC de las secuencias derecha e izquierda:
Ilustramos esta propiedad con un ejemplo:
Expresamos la señal como una suma de secuencias derecha e izquierda:
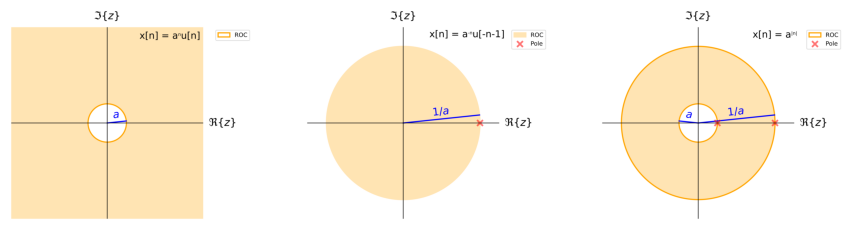
La transformada Z es la suma de las transformadas Z de las secuencias derecha e izquierda, que son casos similares mostrados a los ejemplos 1 y 2 (Exercise 1y Exercise 2):
Ilustramos las regiones de convergencia de , y si (de izquierda a derecha en la figura de abajo).
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
# read images
img_1 = mpimg.imread('figures/T7/example3_ROC_right.png')
img_2 = mpimg.imread('figures/T7/example3_ROC_left.png')
img_3 = mpimg.imread('figures/T7/example3_ring.png')
# create subplot axis
fig, axs = plt.subplots(1,3,figsize=(15,11))
# plot the images
axs[0].imshow(img_1)
axs[1].imshow(img_2)
axs[2].imshow(img_3)
# turn off the axis
axs[0].axis('off')
_ = axs[1].axis('off')
_ = axs[2].axis('off')